摘 要: 三维激光扫描技术是近几年来发展起来的一项新兴技术,该仪器具有采集点云速度快、质量高、精度优良,非接触式的特点,本文分析了三维激光扫描仪外业采集数据作业流程与内业建模处理流程之后,将其利用在日照测量中。分析了系统误差与偶然误差的来源,并且提出了减小误差的方法,最后通过工程实例,比较了与全站仪实测精度以及工作效率,最后得出了三维激光扫描仪在日照测量应用中的可行性与适用性。
关键词: 点云; Cloudworx插件; 日照分析; 立体模型;
Abstract: 3D lasers canning technology is a new technology developed in recent years.The three-dimensional laser scanner has the advantages of fast acquisition speed and high quality.It has excellent precision and non-contact characteristics.After analyzing its data acquisition and processing flow,it is used in sunshine measurement.The source of system error and accidental error is analyzed,and the method to reduce the error is put forward.Finally,through an engineering example,the accuracy and efficiency of the total station are compared.Finally,the feasibility and applicability of the three-dimensional laser scanner in sunshine measurement are obtained.
Keyword: point cloud; cloudworx; sunshine measurement; stereo model;
0 、引言
随着经济的发展,人口的日益增加,有限的土地为满足人类的需求,高程建筑乃至超高层建筑在各大城市拔地而起。随之而来的主要问题也即出现,拟建或者再建高层建筑会出现遮挡原有相邻建筑物的问题。这一问题带来的后果就是侵犯了原有居民的合法权利,早在2007年我国颁布实施的《物权法》中明确规定了[1],因新建的建筑物,对附近已有建筑物的阳光遮挡,必须满足国家住宅日照标准的要求。为城市提供日照测量服务已经是城市测绘院一项日常的常规任务[2]。
三维激光扫描仪是一种以高效、高精度、快速获取点云矢量坐标的仪器渐渐地出现在很多测量工作中,其工作原理是利用扫描仪对目标发射激光,根据激光发射和接受的时间差来计算目标距离,再结合水平方向和垂直方向的距离和角度值,即可计算出目标点的三维球心坐标。这些大量具有矢量性质的点组成点云存储在机器中。三维激光扫描仪中的佼佼者为天宝公司生产的TX8型三维激光扫描仪,其主要技术参数如表1所示:

TX8中配置了激光技术,并结合脉冲技术和相位技术,在120m测程范围内,能够同时保持每秒100万个点的速度和2mm的精度来获取数据,当扩展至340m测程范围时,也可以达到每秒40万个点的速度[3]。本文利用三维激光扫描仪在地铁控制导线基础上,采用外业布置靶球的测量作业模式,同时在外界干扰影响最小的情况下进行作业,图1为天宝TX8三维激光扫描仪。
表1 天宝TX8主要仪器参数
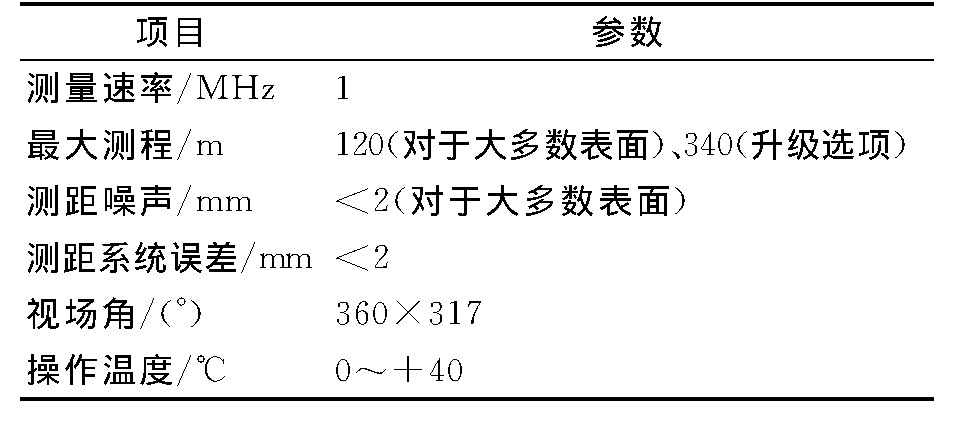
图1 天宝TX8三维激光扫描仪

1 、日照测量内容与要求
日照测量工作即是在待建或者拟建建筑物周边一定太阳高度角下,可能遮挡的范围内,对范围内建筑物及其构筑物测量立面窗口并标示出来的工作。日照测量为日照分析提供基础测量数据。
《城市居住区规划设计规范》中明确规定了建筑物有效日照时间的数值,应满足大寒日日照数不应小于2h。根据大部分城市的规定,需要对拟建建筑高度1.5倍扇形范围的已有建筑进行日照测量分析,并对遮挡的面积与时长进行规定数额的赔偿[4]。
按照日照测量分析的要素归纳总结,对被遮挡建筑测量内容规定如下:
(1)主、客体建筑各建筑尺寸关系测量。日照分析的各个主、客体建筑长、宽尺寸及其间距均需要测量。
(2)主、客体建筑正负零位置及其高程测量。正负零一般指一层室内地坪。正负零高程应采用图根水准测量方法测量。建筑物有多个正负零时,应分别测量标注。
(3)主、客体建筑高度测量。主体建筑应实测其顶面与日照分析有关的、高低错落的各个不同部位的高程,包括檐口、女儿墙、屋脊、水箱间、电梯间、装饰墙等。
(4)建筑立面细部测绘。与日照分析有关的建筑物立面上的窗户、阳台、门的位置、宽度、高度及间距。因不考虑自身遮挡,客体建筑的檐口、女儿墙、屋顶附属物可不必测绘,但对其他建筑造成遮挡的,应测绘。
2 、三维激光扫描仪野外采集数据
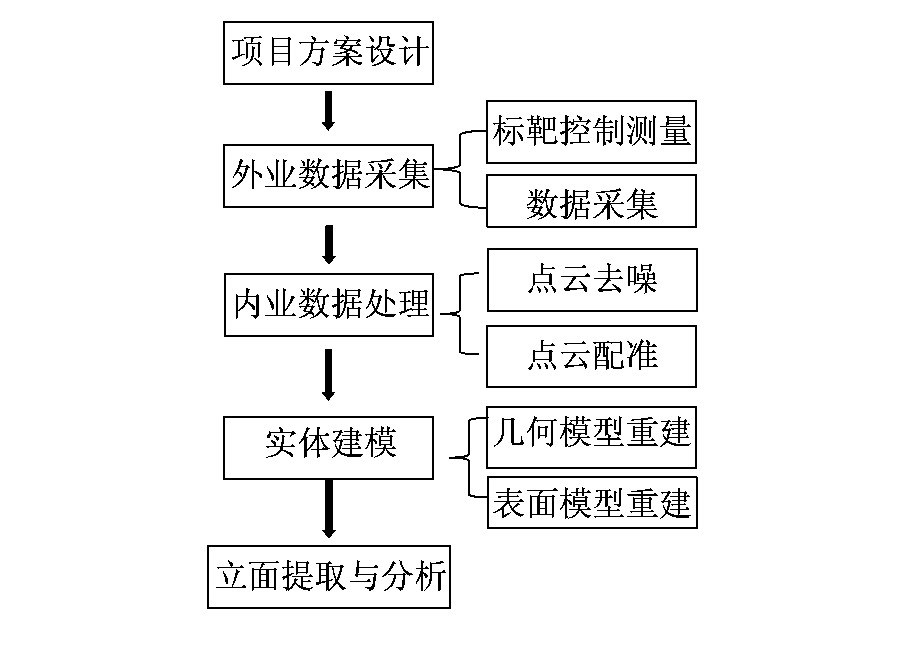
一般三维激光扫描仪在日照测量中应用分为大致三个流程:外业数据采集、内业数据处理、立面模型建立与分析。详细流程如图2所示[5]。
2.1、 控制测量
三维激光扫描仪所获取的点云坐标是球心坐标,为将其坐标转化为当地城市坐标,必须作业前选择适当控制点,用城市网络RTK建立图根级控制点,点位精度优于2cm,完全满足控制要求。
2.2 、三维激光扫描仪外业
外业测量时,相邻测站间均要有三个靶球同时存在等因素。且在仪器工作时,禁止触碰扫描仪,尽量避免有人员或车辆在扫描仪视野中穿过,扫描设置各项参数请参考相关文献[6,7,8]。
图2 作业流程
2.3、 扫描仪数据外业检查
每测站在完成扫描作业之后,要立即进行数据检查。检查内容主要有:(1)检查数据是否已经存储完毕并且保存上;(2)检查是否可以打开灰度图;(3)检查扫描区域是否有遗漏;(4)检查靶球是否已扫描上;(5)检查是否存在噪点或噪点是否影响后期应用。上述若干项检查完毕后方可进行搬站,若上述项目有没通过者,可以框选该区域,选择合适的档位进行局部重新扫描。两次扫描的点云会自动拼接,或者有必要进行重新采集数据。
3 、内业处理
3.1 数据预处理
外业数据采集到的格式均为专业成图软件Trimble RealWorks可识别的标准工程文件,包括由RWI测站文件夹和RWP快捷方式组成的文件。去噪方式分为手动编辑与自动过滤,自动过滤包括距离过滤、离群、统计、角度;手动编辑通过框选噪声点,使用删除工具,将噪声点去除[9]。
3.2 、点云拼接及成果输出
外业采集的成果可采用基于靶球拼接方式,或者采用公共点云拼接。采用公共点云拼接时,两站间的点云重合率根据相关文献和大量的内外业结合得出点云重合率不应少于20%的经验;当采用靶球拼接时,两站间公共靶球数量一般不应少于3个。根据靶球三维坐标将每个测站的点云数据归算到日照测量使用的三维坐标系统中。点云拼接可选择自动配准拼接和手动配准拼接,可根据委托方要求对点云数据进行抽稀处理,输出点云数据和实景浏览成果。
3.3 、立面绘制
将点云拼接的模型数据导入CAD插件Cloudworx中,利用CAD强大的图形编辑功能即可实现立面图的绘制。在Cloudworx中,通过定义不同的投影面,将三维点云模型投影到二维平面,在平面中提取并绘制特征线。有时特征点线模糊不清,可在外业中拍摄立面照片,以供立面图绘制时作参考[10]。
4、 精度分析及减小误差方法
4.1、 点云精度分析
点云数据中误差可根据成因不同分为系统误差与偶然误差。系统误差的大小是由仪器自身硬件条件决定的,如激光的发散度、旋转棱镜的精度、双轴补偿精度等。其中激光的发散度决定了三维激光扫描仪的有效测程,随着距离的增加,激光的发散度不断增加,采集的点云数据精度也随之降低。偶然误差具有随机性,比较复杂。但一般可归结为测距误差、测角误差和外界环境引起的误差三类。其主要影响因素有激光测距误差,三轴误差和外界温度、气压等。此外,目标物体的颜色、倾斜也会对测量误差造成影响。一般表现为,物体颜色明亮的,其吸收激光弱,反射激光强,测量误差相对较小;物体倾斜影响激光入射角越大则误差越大。
4.2 、减小误差方法
(1)增加设站点数目:一是可以减小扫描距离,从而降低激光发散度;二是可以减小激光光束方向与物体表面切平面法线的角度;三是可调节挡位,采用更高一级的档位来获得更多的点云,这样可以更加详细地获得被扫描物体的表面特性。
(2)提高控制网精度。其意义在于减小点云数据拼接时产生的误差,减小重复观测中因控制网误差对点云数据的影响。
(3)提高点云的拼接精度。该方法是选择合适的拼接算法和拼接方法。点云数据量大时,搜索同名点时非常耗时的。因此可在被测目标上提前安置一定数量的反射标靶,就像本文提及的靶球,可有效减小拼接工作量。
5 、应用实例
某城市于2019年6月底审批建设一座216米地标性建筑,该栋建筑审批之后,着手于对周边进行日照分析,因该拟建建筑位于市中心,周边居民密集,建筑多是7层混房。开发商委托该城市测绘院进行日照测量,由于拟建建筑高度巨大,在其影响范围内有130多栋之多,工期紧,任务重。为完成该任务,该城市测绘院采用天宝TX8型三维激光扫描仪,实际外业时间7天完成,如使用全站仪则需要4个班组耗时30工天才能完成外业工作。
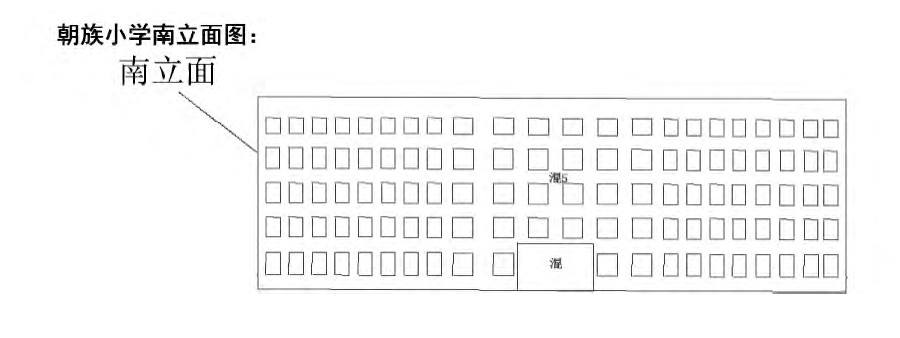
为比较三维激光扫描仪的绝对精度,选择该区域内某朝族小学教学楼为研究对象,该栋楼点云拼接效果如图3所示,根据模型获得的立面数据如图4所示。
图3 点云模型
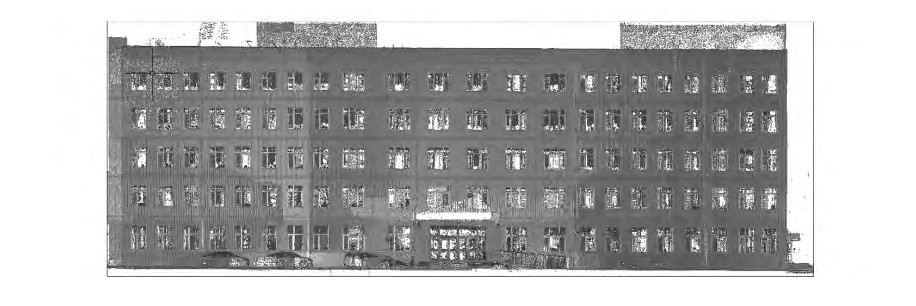
图4 立面图
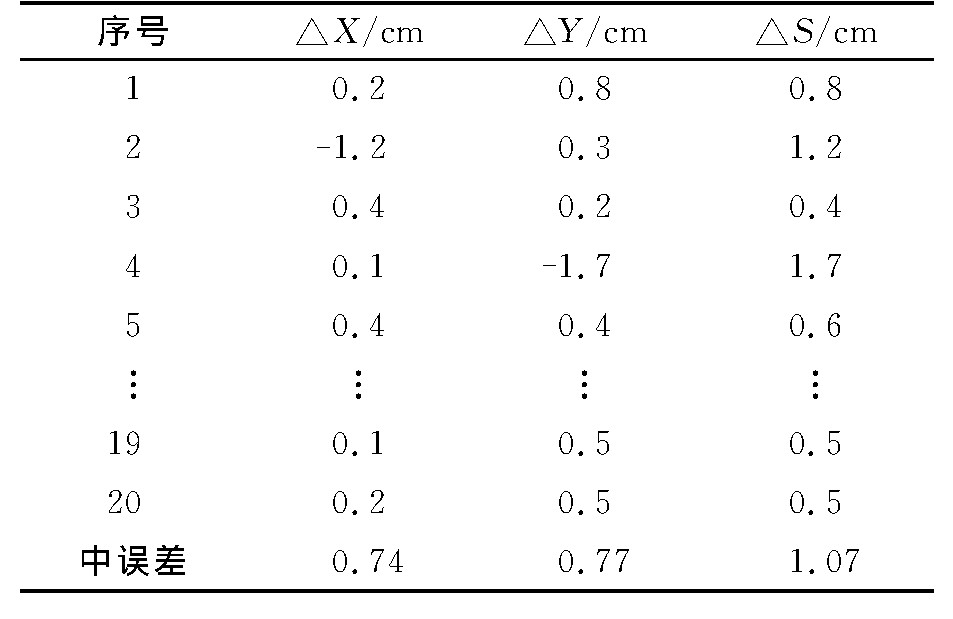
为比较点云精度与传统测量方法(比如全站仪免棱镜方法),本文对该栋建筑提取20个特征点,求得点位中误差,如表2所示:
表2 点位中误差表
提取该栋建筑物特征线20条边,与全站仪测量结果进行比对,得到边长中误差为2.8cm,详见表3。
表3 边长中误差表
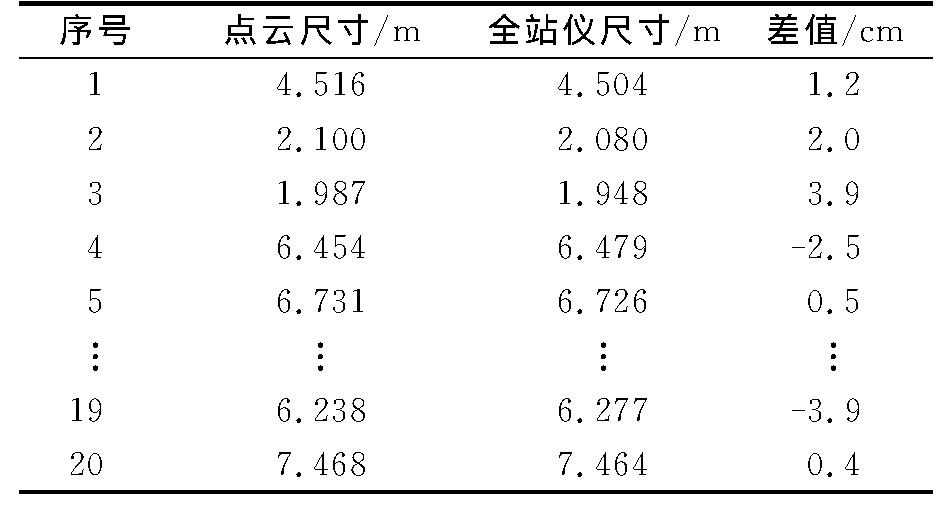
从表2中可以看出,除个别特征点误差在1cm以上,其余点位误差均可满足《城市规范中的要求》。边长中误差小于5cm也满足规范要求。个别误差较大可能与去噪效果不如预期,人眼识别误差,外业扫描角度都有关系。
6、 结束语
本文探索尝试了三维激光扫描仪新的应用,将其应用在日照测量。不仅提高了效率,并且精度也达到了传统测量的精度,完全能够满足规范的要求。但在应用中也会存在一些问题,比如内业立面数据的描绘完全按照个人经验判断;点云中噪点数量巨大,剔除困难;建模中会存在拼接误差,直接降低了立面图的精度等问题有待解决。随着科技的进步,仪器扫描精度的提高,内业成图软件的完善将会慢慢解决诸如以上问题。同时随着多元传感器的融合,三维激光扫描仪必将会用更大的应用前景。
参考文献
[1] 徐凯,郝洪美,郭亚兴.基于三维激光扫描仪的三维文物模型的建立[J].北京测绘,2014,(4):120-122.
[2] 黎其添.几种建筑物立面测量方法对比分析[J].北京测绘,2019,33(7):850-851.
[3] 胡玉祥,李勇,张洪德,等.地面三维激光扫描技术在建筑立面测绘中的应用[J].城市勘测,2019(3):87-91.
[4] 朱祥杰.基于日照分析测量数据的三维建筑模型生产[J].城市勘测,2015(3):45-52.
[5] 杨林.三维激光扫描技术在建筑工程施工变形监测中的应用研究[D].天津:天津大学,2016.
[6] 李彩林,郭宝云,季铮.多视角三维激光点云全局优化整体配准算法[J].测绘学报,2015,44(2):183-189.
[7] 朱庆伟,马宇佼.基于三维激光扫描仪的建筑物建模应用研究[J].地理与地理信息科学,2014,30(6):31-35.
[8] 马俊伟,唐辉明,胡新丽,等.三维激光扫描技术在滑坡物理模型试验中的应用[J].岩土力学,2014,35(5):1495-1505.
[9] 谢谟文,胡嫚,王立伟.基于三维激光扫描仪的滑坡表面变形监测方法———以金坪子滑坡为例[J].中国地质灾害与防治学报,2013,24(4):85-92.
[10] 谢雄耀,卢晓智,田海洋,等.基于地面三维激光扫描技术的隧道全断面变形测量方法[J].岩石力学与工程学报,2013,32(11):2214-2224.