[摘要] 提升机是矿井的关键和重大安全设备之一,用于矿山的竖井、斜井的提升系统,用作提升矿物和物料及设备等,是矿井系统设备的咽喉。在整个生产过程中,占有非常重要的地位,它不仅关系到矿井的正常安全生产和生产效率,而且直接影响上下井人员的生命财产安全。矿用生产是24小时连续作业,即使短时间的停机维修也会给生产带来很大损失。因此,设备的安全可靠运行就显的特别重要。目前的电控系统存在着很多的不足,矿用提升机的技术改造要求迫在眉睫。下面以彩霞山矿井提升机系统为改造对象试做探讨。
[关键字]提升机、提升机变频、变频、提升机变频调速
一、原控制系统与改造后系统对比
目前盛宝矿业彩霞山矿井提升机采用交流绕线式异步电动机转子串电阻调速方案,用交流接触器进行速度段切换。
目前提升机电控系统存在的不足:
(1)挡位调节,调速不连续,运行中机械振动大,矿车冲击大,制动不安全;
(2)启动及换挡时冲击电流大,启动电流一般是额定电流的2-3倍,有时会更大,如果加速快,甚至会引起总开关跳闸;
(3)调速时大量的电能消耗在电阻上,不但浪费严重,也造成工作环境的恶劣,空间噪声大;
(4)维修量大,不方便。由于操作时交流接触器频繁动作,易造成触点及线圈的烧坏,转子更换碳刷频繁;
(5)耽误生产。矿井是连续24小时工作,生产量大,任务繁重,由于电控系统设计落后,制造工艺落后,即使是短时间的维修,也会给生产带来损失。
随着交流变频技术的发展和成熟,变频调速性能的优越性日益显现。以变频器为核心的调速系统,在交流矿井提升机上也越来越多的被采用,彻底改变了沿袭几十年的交流绞车转子串电阻分级调速的模式,使提升机获得平稳、安全、可靠的运行状态。避免严重的机械磨损,防止较大的机械冲击,减少机械部分维修的工作量,延长提升机械的使用寿命。采用变频控制的提升机,基本上可以获得与直流电机相同的调速和制动性能。
控制系统、提升机数字行程控制等系统采用PLC和触摸屏实现控制、监视及人机通讯。确保提升机电控系统具备先进性、可靠性、经济性、精确性、兼容性、高效性等功能特点。
为了确保安全可靠,让变频调速系统与原调速系统并存,互为备用,随时可以切换。
二、系统改造总体思路
1)改造必要性
提升机以绕线式异步电动机转子串电阻(金属或液体电阻)调速为主。这种串电阻调速方式,利用控制器或磁力站对串入转子回路中不同阻值的电阻进行组合,达到调速目的。但缺陷明显,主要反映效率非常低,它以增加转差功率的消耗来换取转速的降低。转速越慢,效率越低,大部分功率被转换成热能而消耗掉。采用变频调速方案就能很好地解决这个问题。变频调速是通过改变定子供电频率来达到电机调速的目的,无论转速高低,其机械特性基本上与自然机械特性平行,所消耗的转差功率都基本不变,因此效率很高,有着明显的节电效果,且调速的平稳性大大提高。在节能、减少维修、提高产品产量及产品质量等方面都取得了明显的经济效益,是电机调速的发展方向。
2)改造方案
为满足安全生产,系统改造保留了原有的工频系统,让变频调速系统与原调速系统并存,互为备用,随时可以切换。如图1所示:
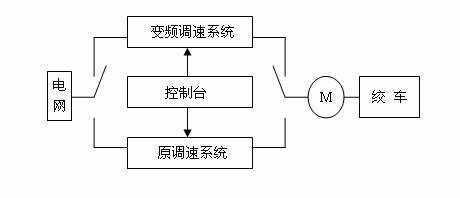
图1 工、变频系统切换控制
高压提升机系统主回为工频电源经过原工频操作的换相器接到变频旁路开关柜的工频输入端子。K1、K2、K3为三台高压隔离开关,为了确保不向变频器输出端反送电,K1、K3与K2采用电磁互锁操动机构,实现电气互锁。K4为转子侧双掷开关,变频运行时,K4切换到变频侧,绕线电机转子线圈经双掷开关K4后处于短接状态;工频运行时,K4切换到工频侧,绕线电机转子线圈经K4接至原调速电阻装置。当K1、K3闭合,K2断开,K4切换到变频侧,电机变频运行;当K1、K3断开,K2闭合,K4切换到工频侧,电机工频运行,此时变频器从高压中隔离出来,便于检修、维护和调试。如图2所示:
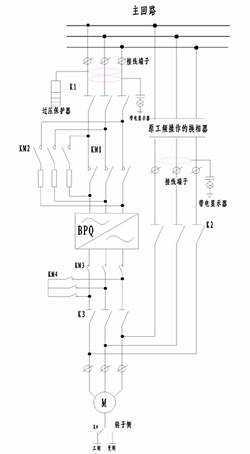
图 2 高压提升机系统改造主回路接线图
另外,为了保证安全,变频器高压联跳信号和上一级的高压断路器也实现互锁,变频器高压连跳串入上一级高压断路器的脱扣线圈,变频器出现故障时,上一级的高压断路器断开,实现高压故障连跳功能。
(1)系统结构
其系统结构见图3,由移相变压器、功率单元和控制器组成。具有30个功率单元,每10个功率单元串联构成一相,图3中给出了系统结构示例。
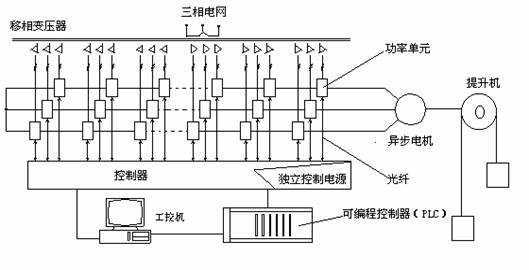
图3 高压变频调速系统结构图
(2)功率单元电路
每个功率单元结构上完全一致,可以互换。其主电路结构为图4。三相电通过整流桥进行三相全桥方式整流,整流后给储能电容充电,确定母线电压。 通过对逆变块B中的IGBT逆变桥进行正弦PWM控制实现单相逆变。当电机进入发电状态后,逆变块B中的二极管完成续流外,又起全波整流作用,使能量能够转移到滤波电容中,结果母线电压升高,达到一定程度后,启动逆变块A,进行SPWM逆变,通过输入电感,返回到移相变压器的次极,通过变压器将能量回馈到电网。

图4功率单元电路结构
(3)输入侧结构
输入侧由移相变压器给每个单元供电,每个功率单元都承受电机电流、1/10的相电压、1/30的输出功率。10个单元在变压器上都有自己独立的三相输入绕组。功率单元之间及变压器二次绕组之间相互绝缘。二次绕组采用延边三角形接法,目的是实现多重化,降低输入电流的谐波成分。
本机中移相变压器的副边绕组分为三区,采用48脉冲整流方式。这种多级移相叠加的整流方式可以大大改善网侧的电流波形,使其负载下的网侧功率因数接近1,输入电流谐波成分低。实测输入电流总谐波成分小于3%。
(4)输出侧结构
输出侧由每个单元的U、V输出端子相互串接而成星型接法给电机供电,通过对每个单元的PWM波形进行重组,可得到如图5所示的阶梯PWM波形。这种波形正弦度好,dv/dt小,可减少对电缆和电机的绝缘损坏,无须输出滤波器就可以使输出电缆长度很长,电机不需要降额使用,可直接用于旧设备的改造;同时,电机的谐波损耗大大减少,消除了由此引起的机械振动。

图5变频器输出的相电压阶梯PWM波形
系统采用三次谐波补偿技术提高了电源电压利用率,利用了调制信号预畸变技术,使电压利用率近似于1。同时系统采用先进的载波移相技术,它的特点是单元输出的基波相叠加、谐波彼此相抵消。所以串联后的总输出波形失真特别小。多个单元迭加后的理论输出相电压波形如图6所示(图中是六单元叠加)。

图6 6个单元输出迭加后的波形
(5)控制器
控制器核心由高速32位芯片运算来实现,可以保证电机达到最优的运行性能。人机界面提供友好的全中文监控和操作界面,同时可以实现远程监控和网络化控制。PLC控制器用于柜体内开关信号的逻辑处理,以及与现场各种操作信号和状态信号的协调,增强了系统的灵活性。
控制器及各控制单元板中采用先进的单片机等大规模集成电路和表面焊接技术,系统具有极高的可靠性。此外还有一个CPU,负责管理LED显示屏和键盘。
另外,控制器与功率单元之间采用多通道光纤通讯技术,低压部分和高压部分完全可靠隔离,系统具有极高的安全性,同时具有很好的抗电磁干扰性能,并且各个功率单元的控制电源采用一个独立于高压系统的统一控制器,方便调试、维修、现场培训,增强了系统的可靠性。
(6) 控制电源
提升机变频调速系统控制电源独立于高压电源的供电体系,在主电路不通入电压的情况下,仅通入控制电源,设备各点的波形与加高压情况基本相似,给整机调试、人员培训带来了很大方便,更大大提高了系统的安全性。
(7)功率单元储能电容
功率单元内部的储能电容采用的是电解电容。
(8)基本控制
1.交流制动。提升机用变频器,交流制动对提升系统的安全运行起到重要作用,当重车在中间停车时,检测到停机信号后给控制器发出信号,让变频器由高频迅速地降到低频(1Hz左右),给提升机一低频制动,让提升机从高速能较快速的降为低速,待PLC检测到机械制动起作用的信号后,PLC发出信号让控制器去掉交流制动信号,使提升机靠机械抱闸装置停稳。启动时,先对提升机施加一交流制动信号,建立启动力矩,待检测到机械抱闸信号后发出信号给控制器去掉交流制动信号,然后由控制器加上启动电压让提升机开始转动。
2.运行速度的控制。为了减少运行过程中的机械冲击,在提升机启动和停止过程中,做到加速度连续,因不同的频率,对应不同的加减速速率,在本装置的控制中,将不同频率时的加减速速率规划成一个表格,运行中用查表的方法确定对应频率时的加减速速率,使提升机平滑运行,减少机械冲击。
3. 再生能量通过功率单元来处理,见图7示:

图7单元控制框图
电机处于发电状态,功率单元母线电压Vbus升高,当母线电压超过电网电压的1.1倍时,CPU根据比较器和相位检测的结果输出六路SPWM波形,使逆变块A中的IGBT工作,通过输入电感,电动机的再生能量最后通过移相变压器回馈到电网,装置充分利用了移相变压器对谐波的抵消作用,对电网无谐波污染、功率因数高、控制简单、损耗小,返回到电网谐波小于5%。
三、技术方案及特点思路
1)总体技术方案
整个提升电控系统分为三个部分:全数字交流变频调速系统、操作系统、监控系统;
调速系统:变频装置,回馈能量直接返回电网,完美无谐波,功率因数接近1。
操作系统采用西门子公司S7-300双PLC双线制控制,配网络化控制的操纵台;
监控系统采用工控机系统含大屏幕彩色显示器、彩色打印机;
操作系统-调速系统-监控系统之间通过DP网络进行系统通讯及信号交换,该系统硬件配置整洁、功能强大、技术先进、安全可靠、高效节能。
2)系统特点:
(1)系统设计选用的变频调速系统功率因数为>0.95,对电网无谐波污染,为绿色环保产品,并能在恶劣电网环境中运行,抗干扰能力强,带有必须的各种保护功能。低速运行时,不仅输出额定转矩,而且具有一定过载能力。
(2)采用了全数字速度、电流、位置闭环控制使提升机在任意速度下运行稳定可靠并保持爬行距离恒定,使提升机具有较高的运行效率。
(3)操作和安全保护系统选用两套不同配置的Siemens公司的S7-300系列PLC,两套PLC互为CPU监视控制。主辅PLC之间相互通讯及监视,操作过程实现双线控制方式,对提升机运行关键的信号(如速度、容器位置、安全、减速、过卷等等)均采用多重保护,互为监视。
(4)PLC操作控制系统能完成提升机手动、半自动、自动(用于主井箕斗提升)、换层、慢动、检修及紧急控制等各种运行方式的控制要求等。
手动操作:司机根据信号系统情况,通过速度给定器件(操作手柄)控制提升机在额定速度以下任意速度运行,自动减速、自动准确停车,同时要受到行程控制器的限制。此操作方式主要用于运送人员、材料和检修等工作。
半自动操作:在半自动运行逻辑正常时,司机根据信号系统情况通过按钮开车,让提升机完成一个提升循环,并具开车联锁;具有自动选择去向,确定运行速度等功能,自动加速、自动减速、自动准确停车。
自动操作(用于主井箕斗提升):在自动运行逻辑具备条件时,提升机电控系统根据信号系统情况让提升机自动完成一个提升循环,并具安全联锁;具有自动选择去向,确定运行速度等功能,自动加速、自动减速、自动准确停车。
检修运行:检修速度:0.3~0.5m/s。检修时只能手动开车。最大不超过2 m/s。
紧急操作:控制及监控系统出现局部故障时,提升系统能用手动应急方式(速度限定在2m/s以内)完成本次提升。
(5)关键环节采用三重或多重保护,比如过卷、超速等。多条安全保护回路之间互相冗余,保证矿山设备的高效、安全运转。
(6)监控系统采用PIV CPU台湾研华产台式工控机作为上位机,配寸彩色显示器及彩色打印机,实现多画面实时监控,多参量数码及曲线显示、记录,各种故障的报警及记录,所记录的图表、曲线多达30天以上所进行的提升循环。
(7)各子系统通过网络进行数据和信号交换实现网络化集散控制,使整个系统的外接线大量减少;
(8)针对极端情况下的液压制动失效,具备主动和被动安全保护相结合的多重保护措施:
l 作为主动安全保护手段之一,可提前发现事故隐患。采用压力传感器对液压系统的油路情况进行动态检测,检测值进入PLC,并可以在上位机显示出出油路回油情况,防止因为出油、回油及油路堵塞的情况。
l 具有零速电气安全制动保护功能:作为被动安全保护手段,在满足《安全规程》要求的前提下,当出现安全制动时,同时具有电气安全制动功能,在零速电气安全制动的作用下,提升容器会往较重的方向作脉动式向下滑行。避免故障扩大,最大程度地减小故障损失。
(9)采取必要的硬件、软件的抗干扰措施如隔离、滤波、合理的结构及布线等,确保整个系统不受电磁干扰、供电电源的干扰,并对其他设备不产生危害性的干扰;
(10)装置的过载能力与电动机的过载能力相当,整流装置能满足四象限运行要求。
(11)整流装置的功率因数高于0.95。
(12)经过优化设计,使设备的性能更加强大,硬件包括接线更加整洁,如原来由继电器进行隔离的线路均由光隔完成,使继电器数目减少到最少的程度。
3)电控系统关键设备的主要特点说明
(1)变频器
交流制动。本提升机用变频器,交流制动对提升系统的安全运行起到重要作用,当重车在中间停车时,检测到停机信号后给控制器发出信号,让变频器由高频迅速地降到低频(1Hz左右),给提升机一低频制动,让提升机从高速能较快速的降为低速,待PLC检测到机械制动起作用的信号后,PLC发出信号让控制器去掉交流制动信号,使提升机靠机械抱闸装置停稳。启动时,先对提升机施加一交流制动信号,建立启动力矩,待检测到机械抱闸信号后发出信号给控制器去掉交流制动信号,然后由控制器加上启动电压让提升机开始转动。
运行速度的控制。为了减少运行过程中的机械冲击,在提升机启动和停止过程中,做到加速度连续,因不同的频率,对应不同的加减速速率,将不同频率时的加减速速率规划成一个表格,运行中用查表的方法确定对应频率时的加减速速率,使提升机平滑运行,减少机械冲击。即通常所说的S形加、减速曲线,见图8。

再生能量通过功率单元来处理,见图9示:
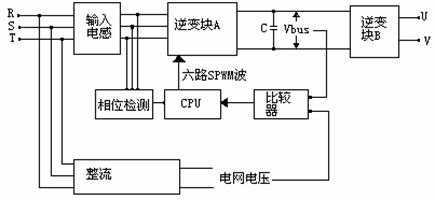
图9单元控制框图
电机处于发电状态,功率单元母线电压Vbus升高,当母线电压超过电网电压的1.1倍时,CPU根据比较器和相位检测的结果输出六路SPWM波形,使逆变块A中的IGBT工作,通过输入电感,电动机的再生能量最后通过移相变压器回馈到电网,装置充分利用了移相变压器对谐波的抵消作用,对电网无谐波污染、功率因数高、控制简单、损耗小,返回到电网谐波小于5%。
提升机配用变频器,直流制动功能对系统的安全运行起重要作用。当重车在井筒中间停车时,变频器由高速平滑地降到低速,随之施加一直流制动信号使绞车停止,当机械制动起作用后方可去掉直流制动信号,使重车靠机械抱闸的作用停在中间。启动时,先对电机施加一直流制动信号,当检测到机械抱闸打开时,方可去掉直流制动信号,加上启动电压,绞车转动。机械抱闸抱紧状态一直在变频器检测下,一旦机械抱闸打开,马上给电机施加直流制动信号,确保重车不可能下滑,要绝对避免“溜勾”现象。
(2)低压电源
双回路进线,手动切换。给出提升机电控设备所需低压电源,包括提升机辅助设备(液压站、润滑站、主电机冷却风机)电源;UPS电源、交流稳压电源等;并且提供备用电源。
(3)可编程控制器(PLC)
主要装有一套主控S7-300系列PLC及一套电子监控器S7-300系列PLC。
主控PLC及电子监控器PLC由CPU模板、电源模板、数字量输入输出模板、模拟量输入输出模板等硬件组成。
主控PLC主要完成以下功能:
1提升机自动、半自动、手动、检修等运行方式控制。
手动:当信号系统发出允许开车指令并具备开车条件后,司机可操作指令手柄和制动手柄进行手动开车,使提升机在选定的速度范围内,以任意速度运行、自动减速、自动停车。
半自动:有了开车指令并具备开车条件后,司机操作按钮开车,提升机按照自动选定的方向和速度,自动加速,自动减速,自动停车。
自动: 信号系统发出允许开车指令并具备开车条件后,提升机按照自动选定的方向和速度,自动加速,自动减速,自动停车,如此循环。这种方式司机只进行监控,不需参与操作。
检修:手动操作,不受系统选定方向限制,用于检修钢丝绳和井筒装备。运行速度限定在0-1m/s之间。
2各种逻辑控制与联锁。
3故障监控与安全保护。
4软件安全回路(与继电器冗余)。
5实现测速元件之间的相互监视。
6输出深度显示信号(数码管精指示和发光二级管粗指示)。
7控制工作闸与安全闸。
8同步校正。
9与上位监视计算机通讯。
系统中紧急停车方式有三种:
1立即安全制动。
2先电气制动后安全制动。
3完成本次提升后,不允许再次开车。
电子监控器PLC采用独立的一套轴编码器作为位置信号,主要完成以下功能:
1位置控制(以位置为自变量给出“S”速度给定信号)。
2给出全程速度设定包络线,进行速度监控(全行程位置—速度包络线监控)。
3与主控PLC的位置信号进行比较,两者相差一定值时,立即安全制动。
4形成软件安全回路。
5产生减速点等位置信号。
6在主控PLC故障时完成有关提升控制。
7同步校正。
接口继电器、硬件保护板件、安全回路控制电器,故障检测及报警器件等。
主要功能有:
控制电路和保护电路。
实现控制信号与故障信号的隔离与转换。
形成硬件安全电路并与软件安全电路相互冗余与联锁。
控制工作闸、安全闸。
简易开车。
(4)上位监视计算机
研华工控机,21寸三星液晶彩色显示器一台,彩色打印机一台。
1具有与PLC通讯。
2监控软件实现:
提升系统动静态画面生成( 如提升过程动态,显示速度动态曲线(给定与实际), 电枢电流动态曲线,提升容器位置动态显示、可调闸电流、制动力矩的动态显示等)。
具有对提升机系统发生的轻重故障进行首次故障诊断和保存,保存时间达10天以上。实现了综合后备保护功能;能显示及打印故障发生的位置、时间、原因以及故障前的有关数据参数,对深度、速度实时值、提升种类、信号情况进行实时显示并记录,相当于飞机上的“黑匣子”功能。
生成各类报表、历史记录并随时打印。所有输出均为中文。
主要画面有:
a) 系统全貌及介绍
b) 高压系统图
c) 低压供电系统图
d) 传动系统图
e) 液压系统图
f) 深度与信号监视
g) 安全回路图
h) 动态速度图及力图(至少保留三幅最新画面)
i) 生产报表,显示并打印当日、当月、全年的提升量。
j) 故障自诊断、故障信息及事件记录(列表及打印输出)
(5)编码器 1套
1两台轴编码器信号一路进入主控PLC,一路进入辅控PLC,作为两路完全独立的数字行程监控器的位置信号,通过网络通讯,两路数字监控器相互比较、冗余控制,实现速度的包络线保护、钢绳松动、位置闭环控制,确保数字监控器的准确、可靠、安全。
2主轴传动装置上的测速机用于速度保护,与数字监控器的速度进行比较监视进一步确保数字监控器的可靠性。
3传动系统的速度反馈采用编码器、测速机双线制反馈方式。
4数字监控器的位置信号参与系统的位置闭环控制,并在操作台上及上位计算机上进行深度及速度显示。
5数字监控器的位置误差由装于井筒中的磁性开关进行双码同步校正,确保控制及显示精度达到1cm以内。
(6)井筒开关
1机械限位开关用于过卷、停车点。
2磁性开关用于减速点、同步校正、停车。
(7)司机操作台
辅控PLC除了具备电子数字监控器的功能外,操纵台上需要从PLC输入、输出口进行接线的,均从辅控PLC就近接线,辅控PLC安装在操作台台体内,并与主控PLC进行网络通讯,各种信号线通过通讯电缆完成,实现网络化控制。 操作台上装有指示灯、仪表、选择开关、按钮、声响设备、数字深度指示器等,能实现提升机运行的各种控制工艺的要求。
辅控PLC由主机架、电源板、CPU板、通讯板、高速计数板、模拟量I/O板、数字量I/O 板等模板组成。有独立的安全保护环节,与主控PLC互相监视,协同工作。
仪表主要显示的内容:罐位数字深度指示器及柱式模拟深度指示、制动油压、可调闸电流、高压电源电压等。
1组合指示灯的内容包括:提升机运行状态指示、信号指示和安全状态指示两大类。
2选择开关及按钮包括:运行方式选择开关、过卷复位开关、自锁式紧急制动按钮、半自动开车按钮、实验按钮(或开关)等。
3重要的操作信号和成组的报警信号均在操作台上的信号板显示出来,保证在没有图形显示系统的情况下,仍然可以操作。
四、安全保护
1)安全保护分为三类:
l 第一类,严重故障,立即断开安全回路实施安全制动;第二类,较严重故障,先减速到1m/s后实施安全制动,但如果发生第一类故障立即实施安全制动;第三类为轻故障,允许一次开车,本次运行结束后不维修好不能再次开车;
l 第一类严重故障包括:等速过速、限速过速、包络线超速、爬行段超速、高低压电源故障、过流、变频器故障、错向、PLC故障、过卷、急停操作、网络通讯故障、摇台(或闸门、安全门)在运行中落下或打开、2只测速元件同时损坏、井筒开关失灵、主回路失压、速度比较错误、残压高等等;
l 第二类重故障包括:机械深度指示器失效、钢绳滑动保护、编码器位置偏差过大、制动油路故障(油压过高、堵塞)、闸瓦磨损、主回路过压或欠压等等;
l 第三类轻故障:1只测速元件损坏、润滑温度高、润滑油压高/低、弹簧疲劳、闸盘偏摆等等。
2)系统具备的安全保护
1等速过速:在全速段运行时,出现电机失控,绞车速度超过全速时的115%时安全回路动作;
2低速过速:在减速段运行时,绞车未能按照设计要求减速,并超过给定速度10%时安全回路动作;
3过卷保护:当罐笼超过停车点0.5米时安全回路动作;
4松绳保护:在出现罐笼卡滞或其它因素造成钢丝绳松弛下坠时安全回路动作;
5深指失效:亦即断轴保护,当机械深度指示器机械传动机构出现断裂、卡滞故障不能正确指示罐笼实际位置时安全回路动作;
6闸瓦磨损:当盘形制动器因长期运行磨损严重,危害到绞车制动安全时安全回路动作;
7弹簧疲劳:当盘形制动器因长期处于较高油压压制,反复伸缩造成弹簧疲劳,弹簧弹力不足,危害到绞车制动安全时安全回路动作;
8满仓保护:该保护适用于有称量装置的箕斗提升设备,当装在物超出设计最大承载量时安全回路动作;
9欠电压、过负荷:当主回路电压过低或负载过重产生大电流,对电机产生危害时安全回路动作;
10手柄错向:当选定绞车运行方向与司机操作方向不一致时安全回路动作;
11反转错向:当负荷过重造成绞车转动方向与控制转动方向相反时安全回路动作;
12溜车保护:当拖动电机未上电,而出现绞车松闸自由滑行时安全回路动作;
13定点过速:当罐笼运行之井口时,其出井口速度大于2m/S时安全回路动作;
14通讯故障:当双主机PLC通讯出现故障,不能正确交换数据时安全回路动作;
15液压站过压:当液压站压力失控,造成压力过大对系统产生不良影响时安全回路动作;
16测速故障:测速机与轴编码器相互监视,当这两种测速元件有一种出现故障时安全回路动作;
17离心开关保护:作为等速超速的机械机构保护,当离心开关因转速过高而动作时安全回路动作;
五、上位机组态设计
(1)上位机的主要功能
对提升机的运行状态实现多画面实时监控,对状态、故障做到准确显示和实时报警,具备齐全的人机对话及记录显示功能,画面上能直观了解到提升机运行的实时工况,发生故障时能自动弹出故障界面,并引起司机注意。具有历史记忆和故障记录功能。所有报警和操作信号,能在显示器显示。实现提升全过程的位置、速度监控。
(2)上位机有如下显示功能
① 提升速度数字显示,
② 容器位置数字显示;
③ 液压站油压显示;
④ 提升勾数显示 ;
⑤ 提升方向显示;
⑥ 安全回路状态显示;
⑦ 检修画面显示;
⑧ 提升容器位置柱状图显示;
⑨ 提升速度实时曲线图、速度保护包络曲线图显示;
10历史故障查询显示;
11 操作方式显示。
(3)系统具有如下画面
1系统主画面
2安全回路画面
3状态指示画面
4报警画面
5参数设定画面
6故障记录画面
7速度曲线画面
8时钟校准画面
9历史故障查询画面
六、新系统与原系统的经济技术比较
1)技术性能
变频调速属无级调速,闭环控制,调速范围大,调速精度高,爬行速度易控制,重物下放操作时易操作,安全性能好,对提升机等相关机械设备在运行和停止过程中冲击比较小。电阻调速属有级调速,开环控制,调速精度低,爬行速度不易控制。重物下放操作时,需动力制动与转子电阻配合操作,全凭司机的经验和感觉,很难准确控制,安全性能差对提升机等相关机械设备在运行和停止过程中冲击比较大。
2)间接效果
(1)变频系统无需原电控调速用的交流接触器及调速电阻,提高了系统的可靠性,改善了操作人员的工作环境,使噪音及室温降低。
(2)调速连续方便,连续平滑调节。
(3)实现了低频低压地软起动和软停止,使运行更加平稳,机械冲击小。
(4)启动及加速过程冲击电流小,加速过程中最大电流不超过1.3倍的额定电流,提升机在重载下从低速平稳无级平滑的升至最高速,没有大电流出现,减小了对电网的冲击。
(5)采用回馈制动技术,成功解决了位能负载在快速减速或急停时的再生发电能量处理问题,保证了变频器的安全运行。
(6)采用变频控制后,可采用原绕线式电机,不需要作任何改动。
3)节电性能
串电阻调速装置在减速和重物下放时需投入动力制动,消耗外加直流电源功率,并将电动机的再生能量消耗在转子电阻上。而四象限变频调速装置在减速和重物下放操作时,能自动地将电动机的再生能量反馈至供电电网,实现再生反馈制动,节电效果明显。采用变频调速装置较串电阻调速装置省电35%以上。
网侧变流器实行PID控制,对网侧交流电流的大小和相位进行实时检测并控制,使输入电流与电源电压保持同相位,使系统的功率因数总接近等于1,功率因数COSФ>0.95。这样就提高了功率因数,减少了无功消耗,此项可节约电能15%左右。
4)绞车保护
变频调速装置本身具有过压、欠压、过流、过负荷、缺相、超温等保护,同时可选配数字式深度监视器,可实现绞车过卷、过速、减速、限速等重要保护的双线制保护功能,满足安全规程要求。
转子串电阻调速装置,无电动机过负荷、缺相、超温保护,无限速、自动减速功能,对过卷和超速只有单一保护功能。
转子串电阻调速装置内的鼓形控制器、正反向接触器通过电流大,又频繁动作,触点易烧损;电阻发热量大、接头多、易氧化或接触不良而发热,所以维护量极大。
变频调速装置采用无触点控制,电机的正转、反转采用计算机控制,加上变频调速装置的功率器件及控制计算机模件均采用进口产品,产品质量优良可靠,维护量极低。
5)维护方面
变频调速装置+PLC及上位机控制,技术先进、制造工艺严格,属于逻辑控制,动作接点很少,基本属于免维护产品。
TKD系统主要靠继电器和接触器来操作提升机的运行,动作接点多,逻辑过程比较繁琐,很容易产生故障点,维护比较麻烦。
七、结束语
通过理论测,提升机在使用变频调速后,节电率在30-40%左右,且控制质量大为提高,实现无级调速。同时由于电动机不再需要频繁地起动和停止,不必再由继电器、接触器进行控制,使整个系统的寿命大为延长。实现软停和软起,消除了电动机硬起动过程中对电网的冲击。另外操作简便,省时省力。
矿用绞车绕线电机改用变频调速方式后,系统具有一定的节电效果,更重要的是具有柔性化控制,使系统的性能大大提高和机械部份寿命延长的同时使提升机获得平稳、安全、可靠的运行状态。
[1]卢燕.矿井提升机电力拖动与控制.北京:冶金工业出版社,2001
[2]王永华,陈玉国.现代电气控制及plc应用技术.北京:航空航天大学出版社,2003
[3]余发止.国内为矿井提升机的现状与发展.矿井机电,1995年第3期
[4]叶予光.基于plc技术的矿井提升机电控系统.机电一体化,2004年第6期
[5]蒋宏民.plc技术在我国矿井交流提升系统中的应用研究.冶金矿山设计与建设,1998年第4期
[6]张红岩.可编程控制器在交流提升机电控中的应用.中州煤炭,2005年第4期
[7]马建民、赵增玉著,《现代提升机数字控制系统》,中国矿业大学出版社,2002年8月
[8]曾毅等著,《变频调速控制系统的设计与维护》,山东科学技术出版社,1999